National Robotics Challenge
Project Overview
Lead a team in the Manufacturing Workcell category at the National Robotics Challenge. Our solution was a fully autonomous 3D print farm that handled the complete printing process without human intervention. Utilizing two open‑source Voron printers and a novel plate‑swapping system, the project won both the Gold Award and the Honda Innovation Award in our category at the National Robotics Challenge 2025.
My Contributions
Creation and Management of Digital Twin

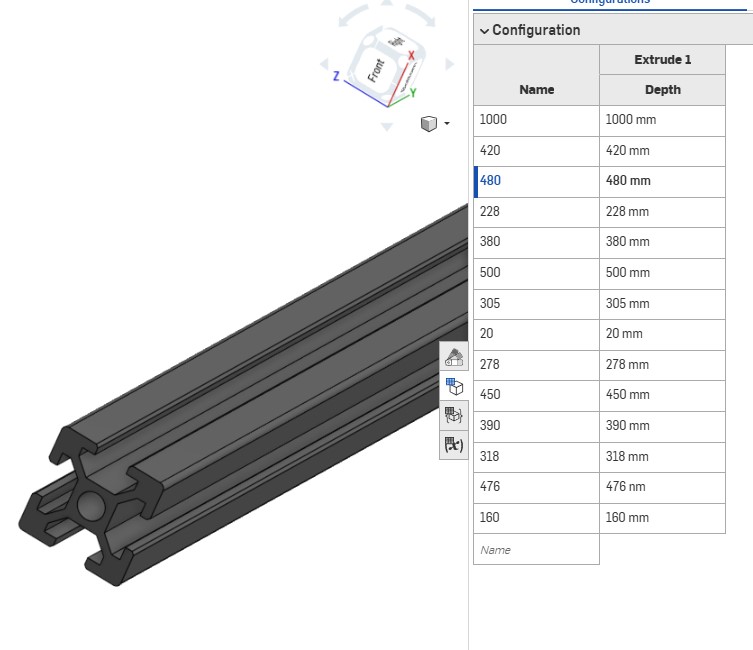
Created and maintained a live Onshape model for every subsystem built, ensuring that mechanical, electrical, and software groups all referenced the same source of truth. I created configurable aluminum‑extrusions and hardware libraries that minimized unique part counts and sped up BOM generation. Sub‑assemblies were used wherever practical to keep the main workspace organized and improve load times.
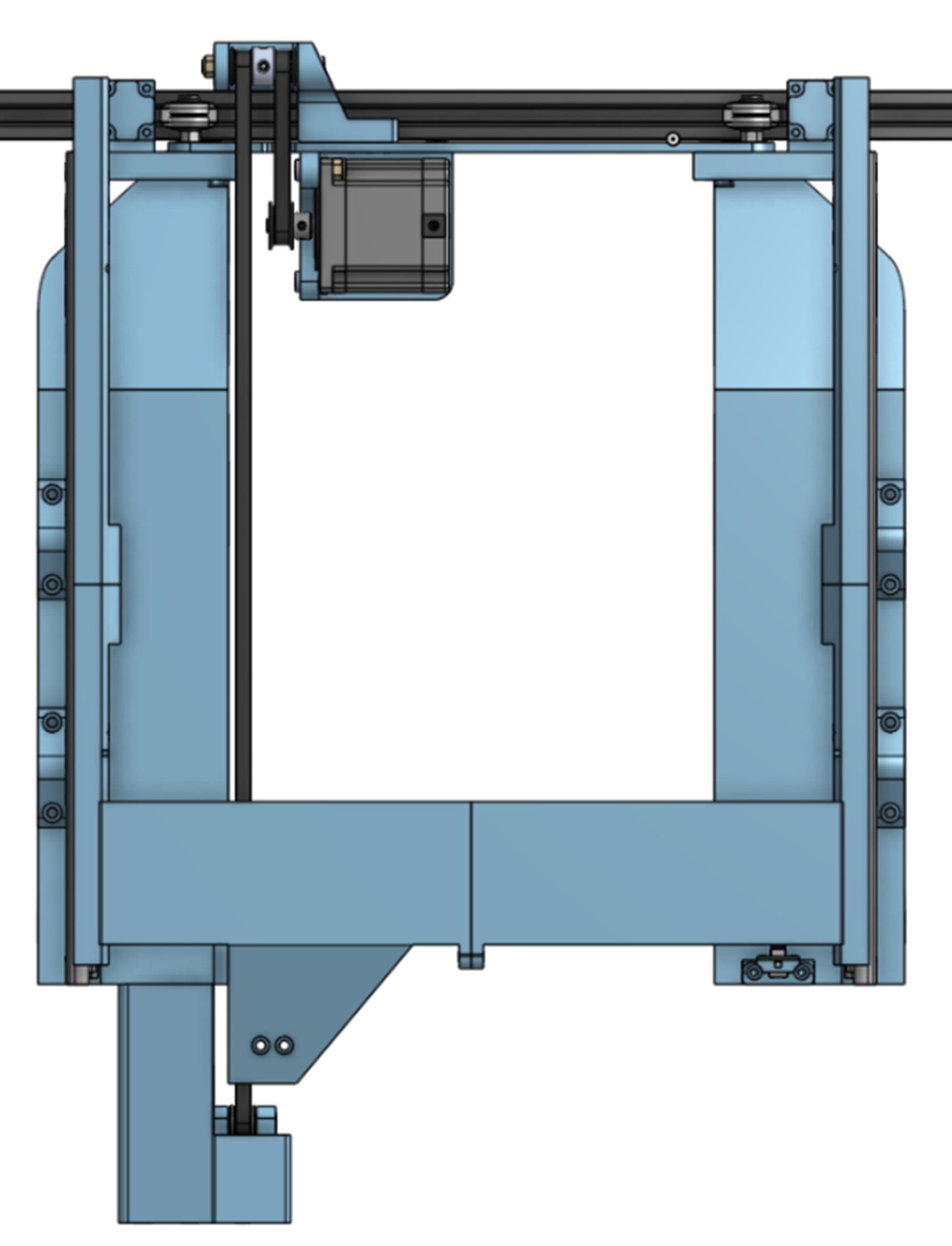
Cartesian Gantry System
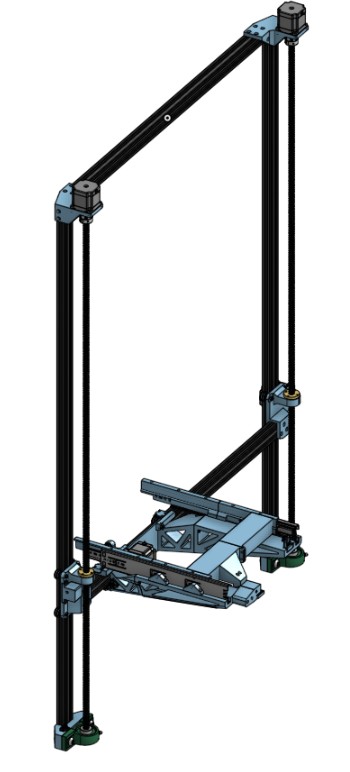
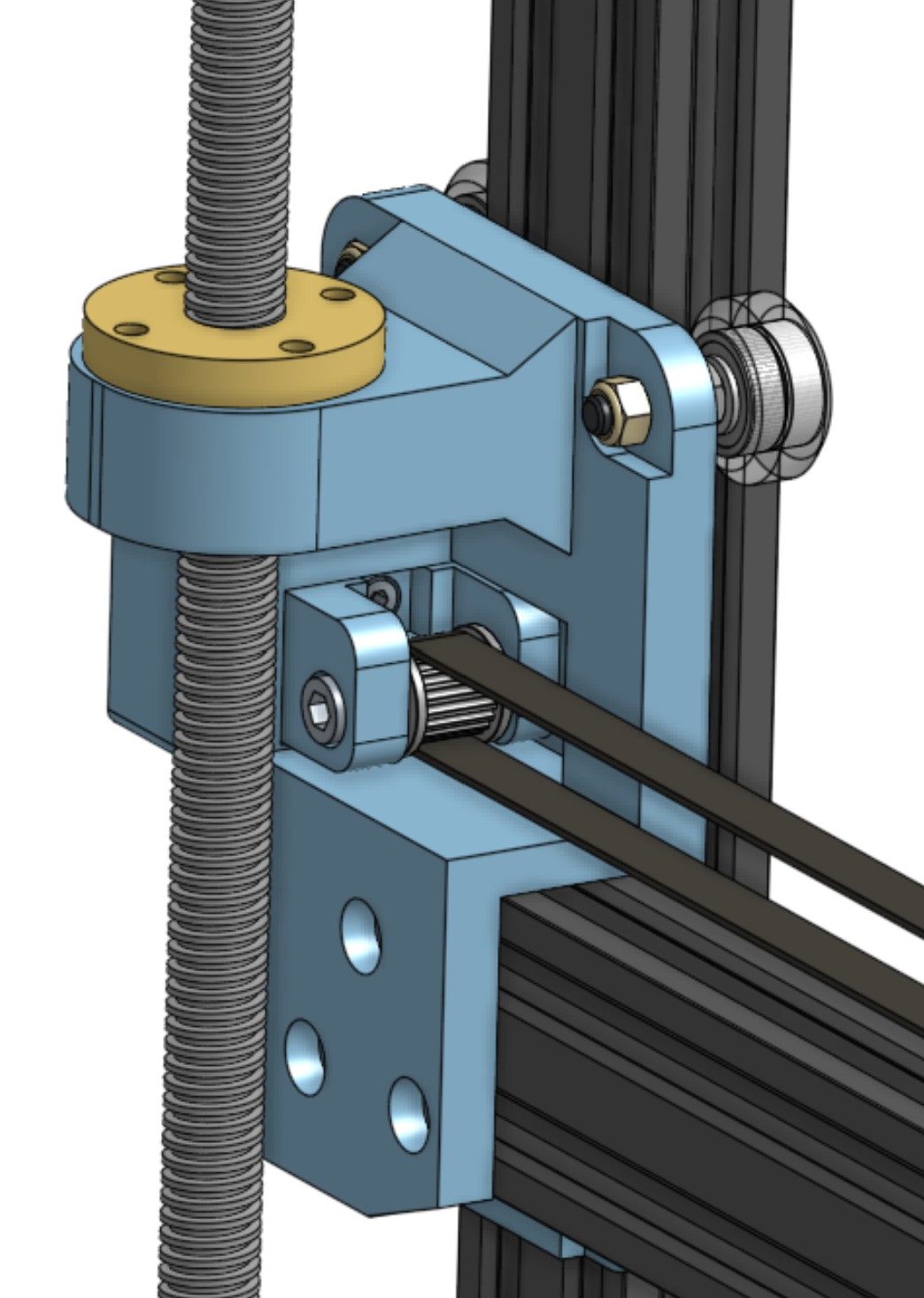
Designed, modeled, assembled, and tested a Cartesian gantry system using a dual leadscrew design for the Z‑axis and a belt‑driven X‑axis. Both axes were driven by stepper motors, with limit switches on both sides of the Z‑axis and the X‑axis for leveling and homing. The X‑axis featured a custom screw‑tensioner mechanism for tensioning the GT2 timing belt, ensuring consistent and precise movement throughout the system's operation. Aluminum V‑groove extrusions and V‑wheels were used as linear guides.
Pick-and-Place Mechanism
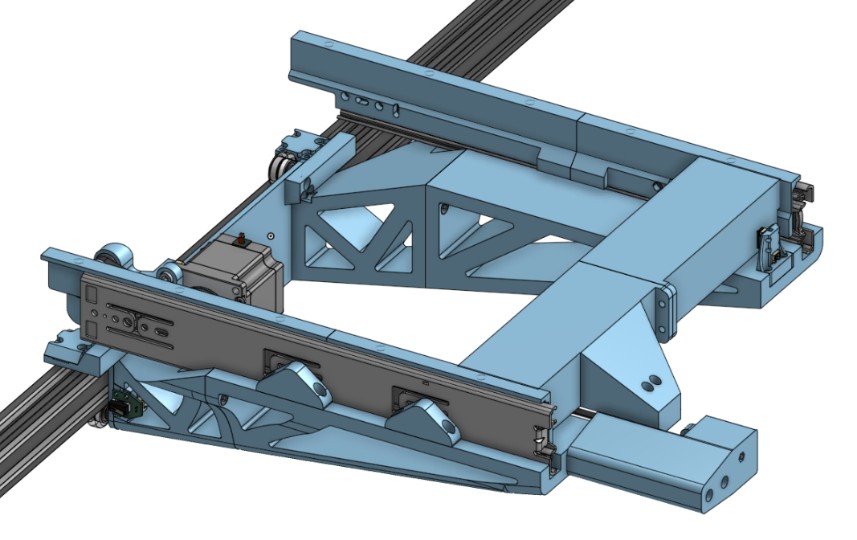
Designed, modeled, assembled, and tested a forklift‑like pick‑and‑place mechanism to remove prints from the print bed. I implemented oversized plates for the printer so a portion would hang off the side of the heater. The forklift would insert from both sides and, using embedded magnets and the Z motion of the gantry, lift the plates (and any prints) off of the printer. This design left a section of the plate hanging off the side of the forklift, which rested on the plate holders as the gantry dropped off the plate in the shelf. The extrusion system used a two‑stage belt drive to maximize range. Drawer slides were selected for their thin profile and resistance to bending. The magnets eliminated the need for mechanical grippers, simplifying the system while improving reliability.
Shelving Units
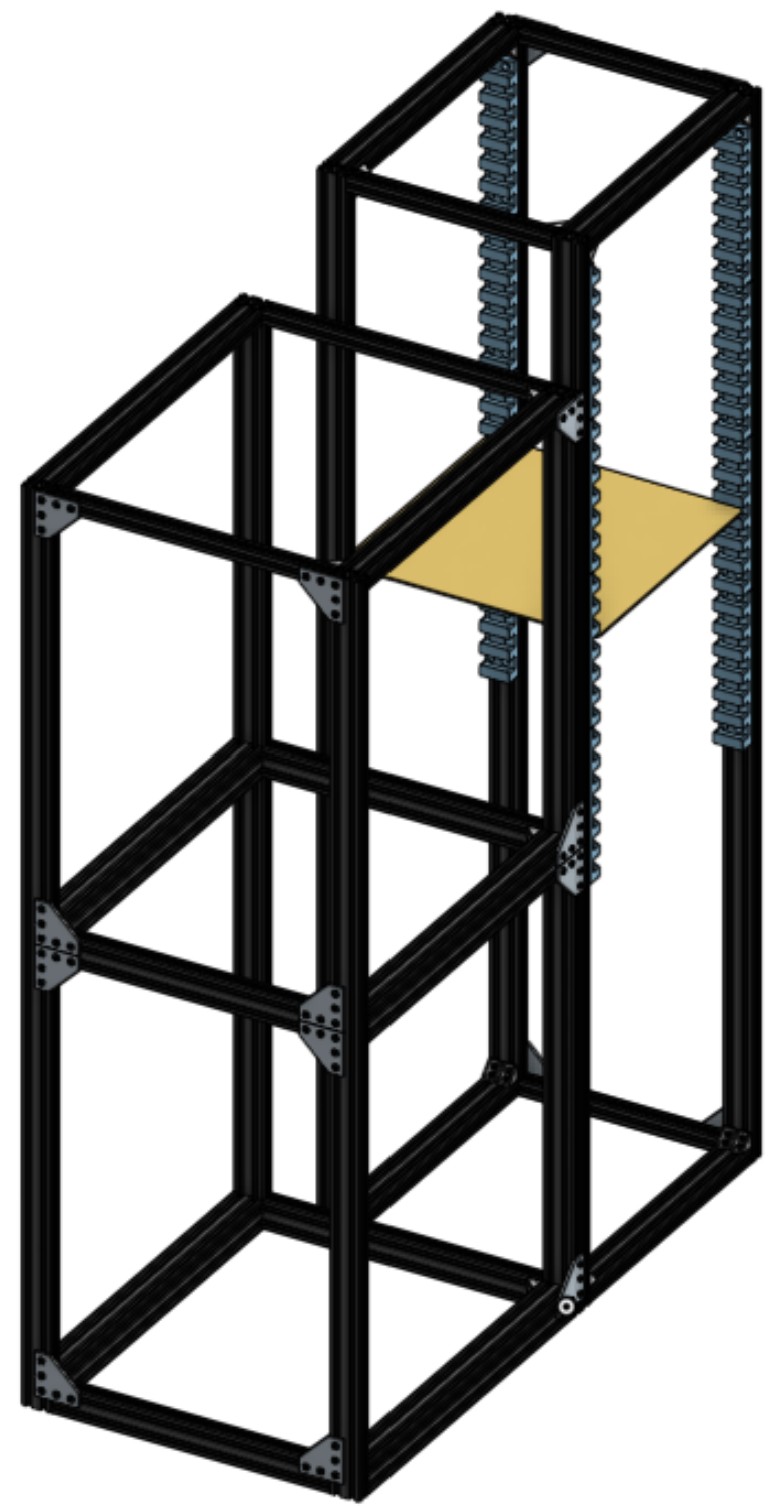
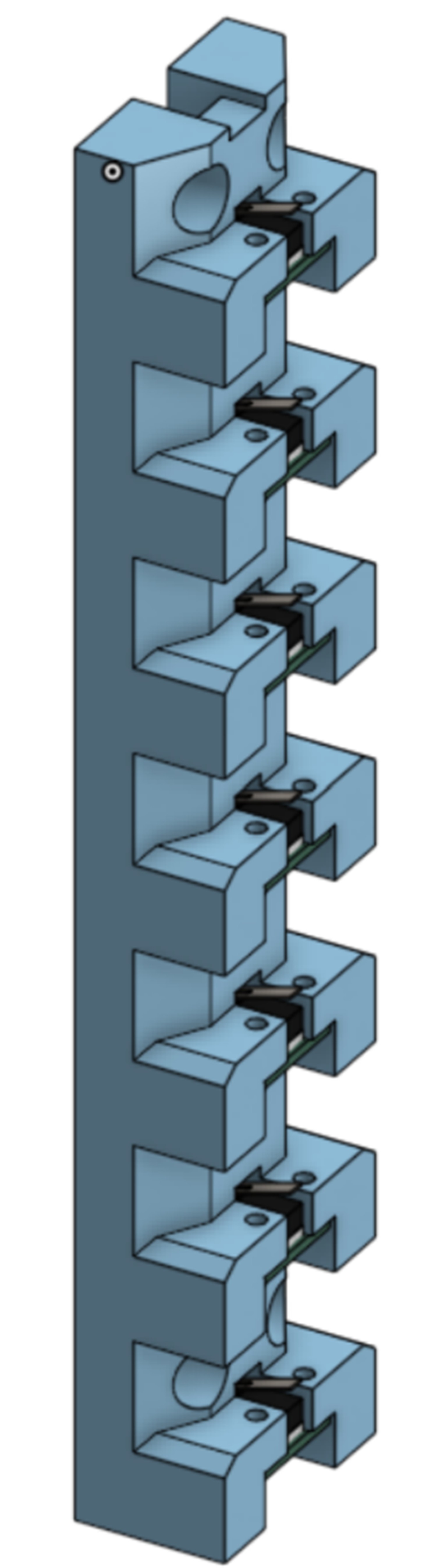
Designed, modeled, assembled, and tested shelving units for the stacked printer assembly, housing two Voron 2.4 printers and the plate holders. The shelving units were constructed from aluminum extrusions for rigidity and ease of assembly. The back‑left array of plate holders compactly housed a limit switch in each rung, allowing the system to check if a plate had been deposited or picked up at any given time, providing real‑time feedback to the control software.
Team Management
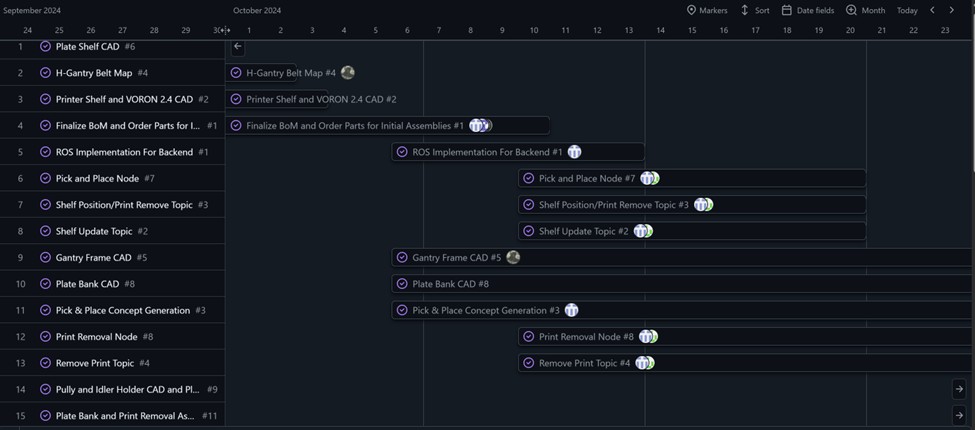
Built and maintained a comprehensive GitHub Projects workspace that included a dynamic Gantt chart. This single view aligned deliverables across hardware and software sub‑teams, documented tasks, and surfaced blockers early, keeping the 15‑person team on schedule.
Technologies Used
- Onshape for CAD design and digital‑twin management
- Dual leadscrew Z‑axis with belt‑driven X‑axis
- Two‑stage belt drive system for extended reach
- Magnetic plate attachment system
- Limit switches for homing and position verification
- Aluminum extrusion framework
- Voron 2.4 3D printers
- GitHub Projects for project and schedule tracking
Awards
Gold Award
National Robotics Challenge – Manufacturing Workcell Category, 2025
Honda Innovation Award
National Robotics Challenge, 2025