IEEE SoutheastCon Robot
Project Overview
I played a cruicial role in the design and fabrication of a robot for the IEEE SoutheastCon 2024 competition. Our robot achieved the highest scoring run out of 35 participating universities and won First Place in the Hardware Design Competition.
The competition required robots to navigate a complex course and complete multiple tasks with complete autonomy. The robot needed to manipulate 3 types of objects: small blocks, big blocks, and small cylinders called thrusters, as well as crossing a 7-inch wide, 2-inch descending gap. There was a strict 12×12×12 inch volume limit, so designs had to be space-conscious and volumetrically constrained.
My Contributions
Chassis
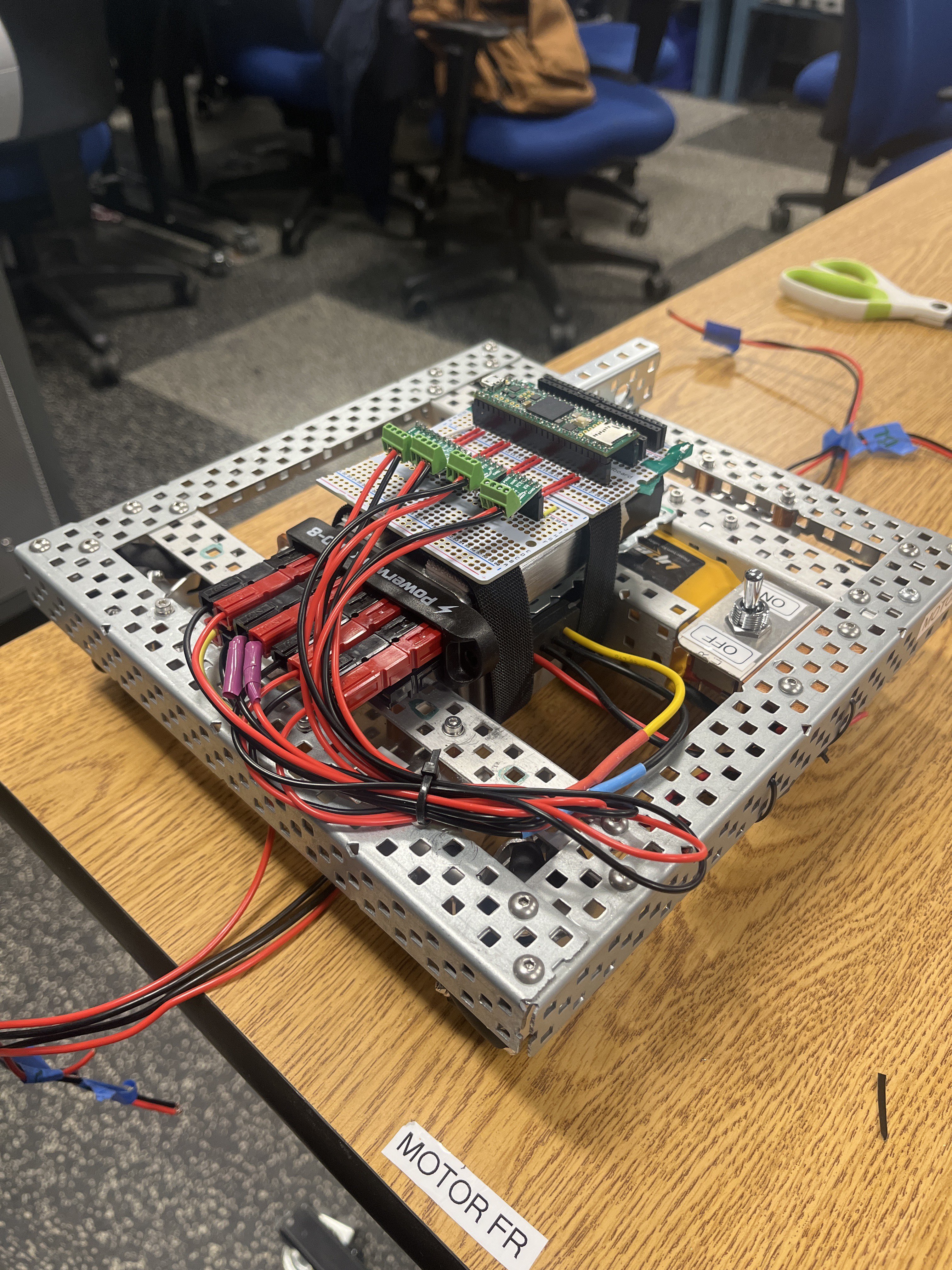
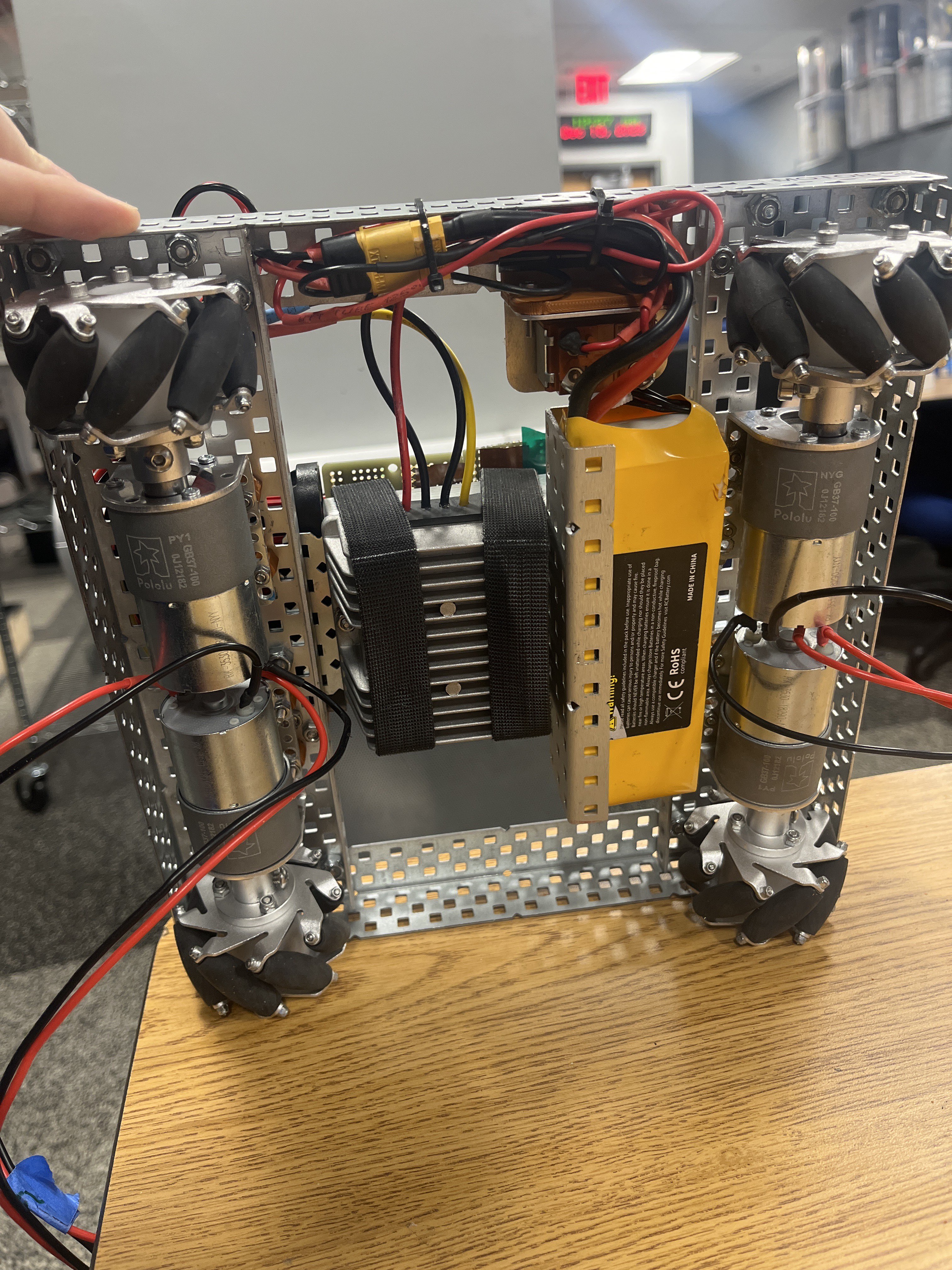
Designed, modeled, and assembled a 10×10 inch chassis compactly housing 4 DC motors and other necessary electronics using mostly VEX metal parts. The chassis was designed to maximize internal space while maintaining the strict 12×12×12 inch size constraints. This formed the foundation for all other components and mechanisms, allowing for efficient integration of the bridge deployment system, thruster pickup, and block manipulators.
Bridge
Designed, modeled, and assembled a bridge and bridge deployment system to cross a 7-inch wide, 2-inch descending gap. The bridge and bridge placement device were 3D printed. The placement device featured an embedded gear driven by a 360-degree servo and a pinion. The deployment mechanism used a keyhole-like slot on the bridge, which allowed the servo horn attached to the bridge placement device to release it when turned.
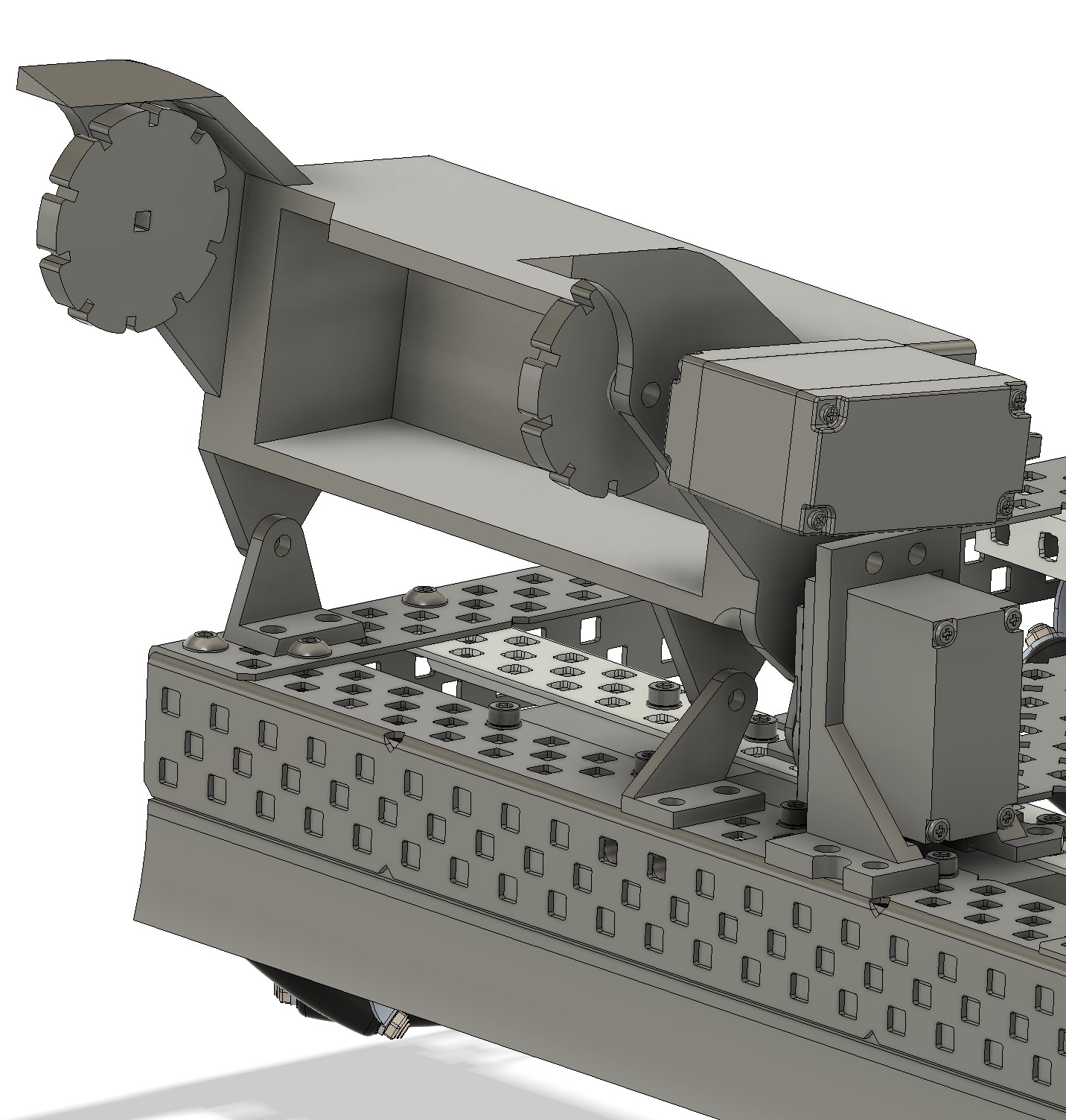
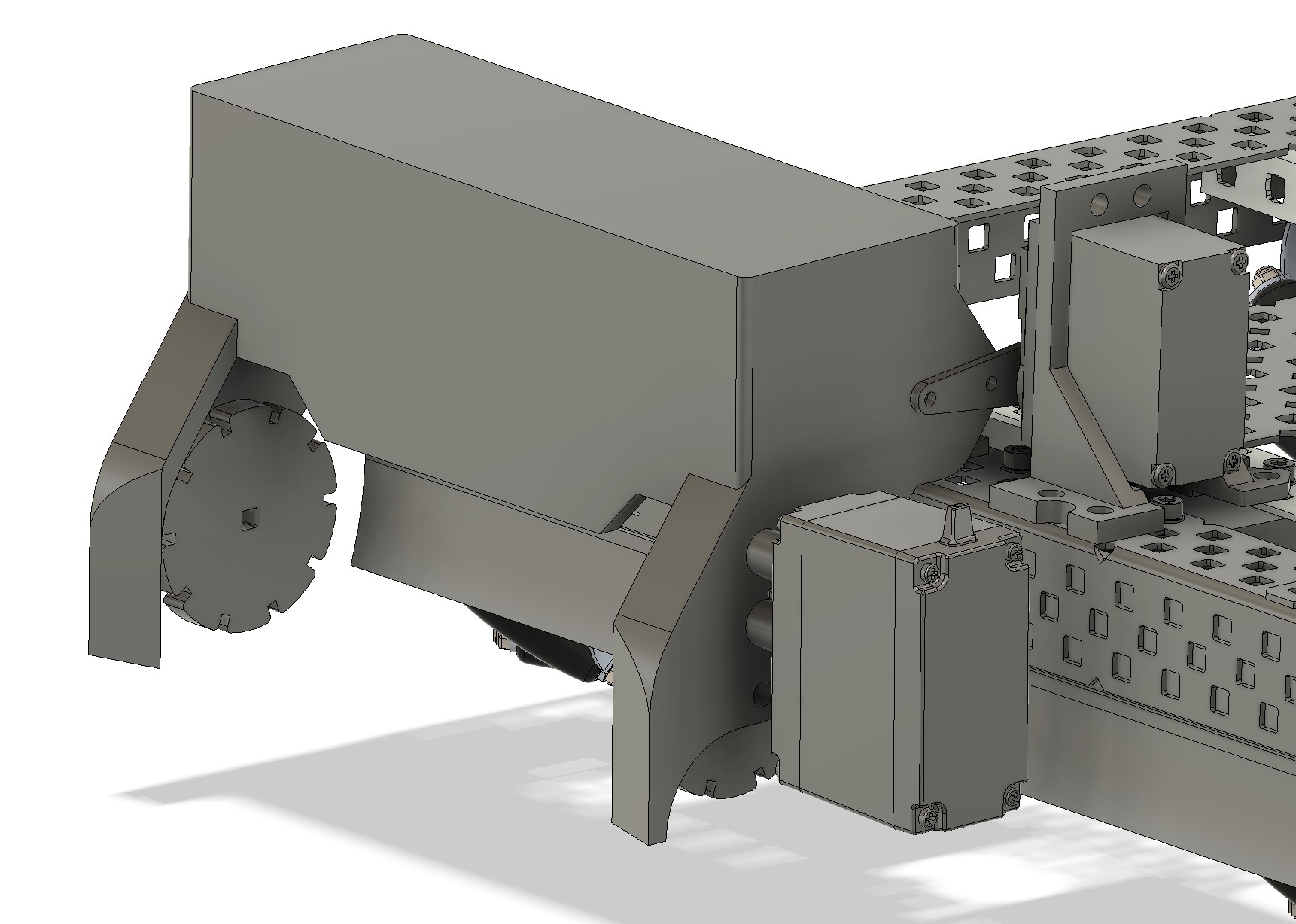
Thrusters Pickup
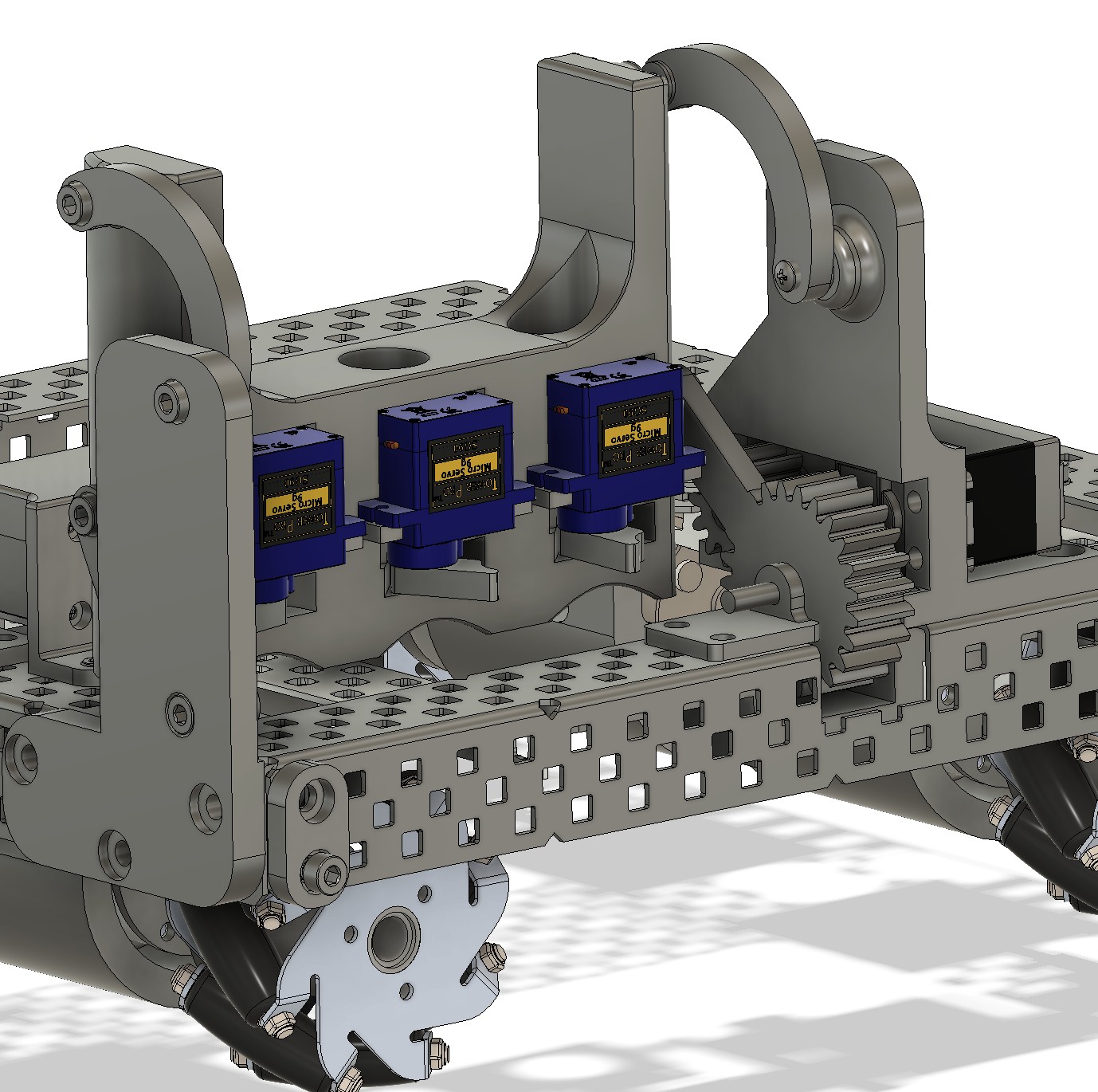
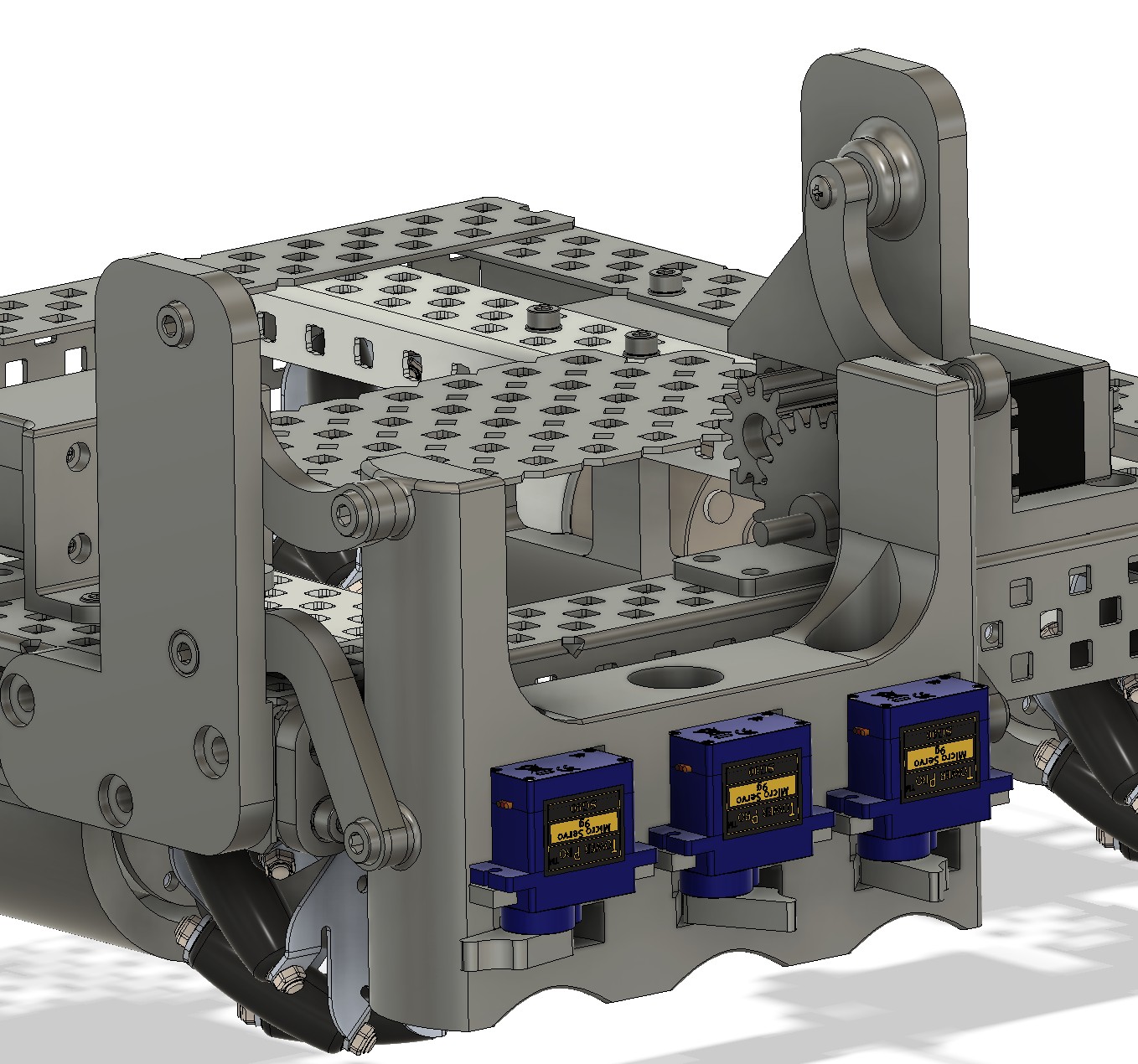
Designed, modeled, and assembled a device to pick up small cylindrical game pieces. This was done using a 4-bar linkage that, when not deployed, was securely housed within the chassis, and then utilized a parallel 4-bar motion to deploy out of the frame and onto the thrusters. The linkage crank needed to be driven by a 3-to-1 gear ratio to account for low servo torque, so another embedded 3D printed gear was used.
The main thruster holders being driven by the linkage system was essentially a rectangular prism with an array of 3 cylindrical cutouts, flaring out at the bottom to guide intake. Mounted next to each thruster hole was a small servo with a custom servo horn which would hold the thrusters in place once actuated.
Small Blocks
I did not design the original small blocks intake; however, I was tasked with helping refine it and ensure that it fits within the 12×12×12 inch constraints. I added a mechanism that allows it to fold up into the chassis, as well as remaking and shielding the rubber band holders to improve reliability and durability during competition.
Technologies Used
- VEX metal components for chassis construction
- DC motors for drive system
- 3D printed custom parts for specialized mechanisms
- Servo motors for precision control
- Fusion 360 for all CAD work
- 4-bar linkage systems for deployment mechanisms
- Custom gearing systems for torque optimization
- Embedded microcontroller for autonomous operation
Awards
First Place
Hardware Design Competition – IEEE SoutheastCon 2024