Micron‑Precision 3D Printer
Project Overview
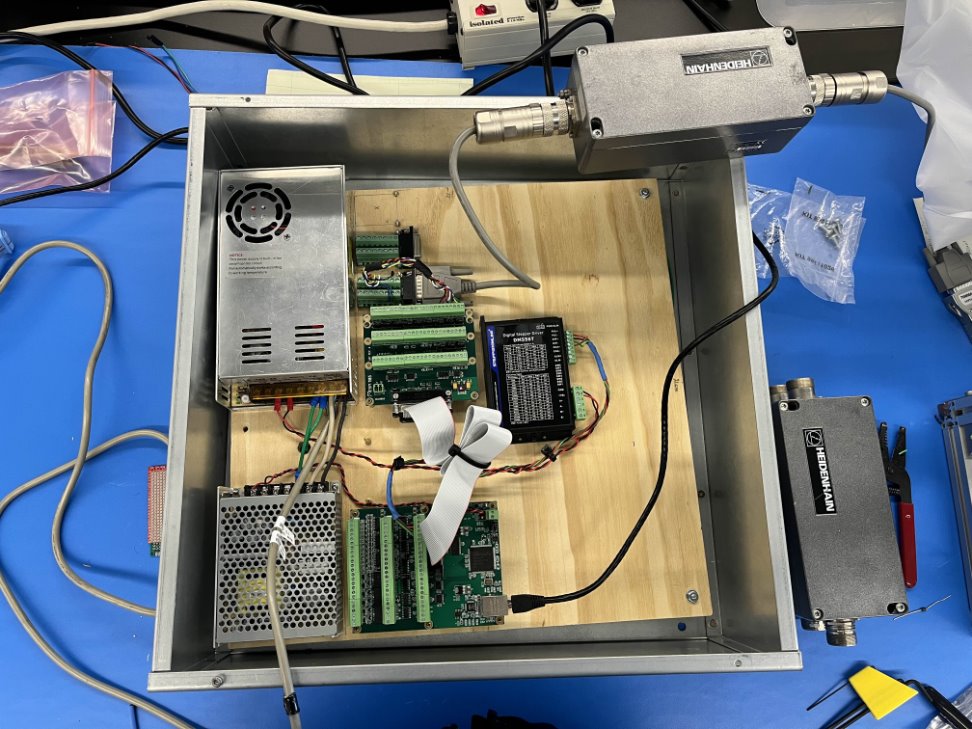
Senior capstone project to build a research‑grade 3D printer accurate to ±1 µm. The motion platform uses pre‑loaded ground ball screws, 1 µm linear scales, and high‑torque stepper motors under LinuxCNC control. A pneumatic extruder lays down a silver‑filled polymer, letting us print conductive traces directly onto the part. My team focused on making the XYZ stage rock‑solid so the materials group could experiment with functional circuitry.
My Contributions
System‑Level Wiring Diagram
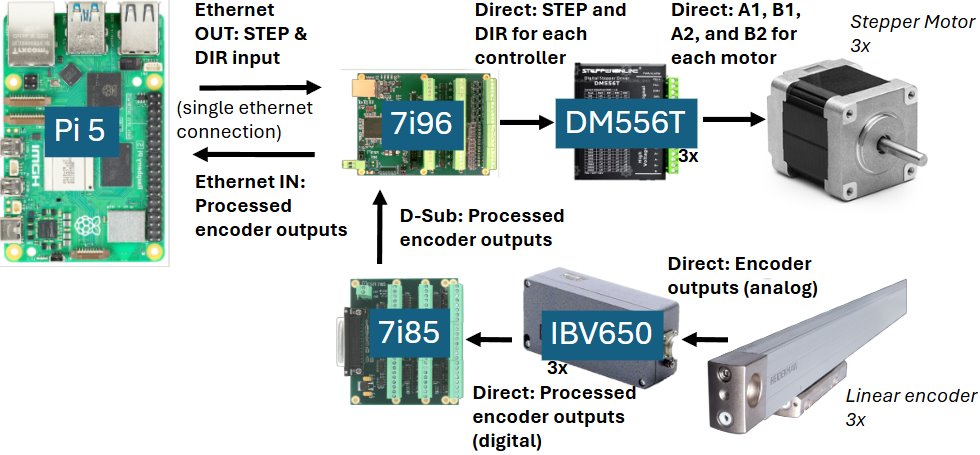
Produced the master wiring diagram covering motion control, limit switches, linear scales, and pneumatic valves. The color‑coded harness map kept assembly quick and made future debugging painless; every reference is cross‑linked to the LinuxCNC HAL pins.
Electrical Schematic
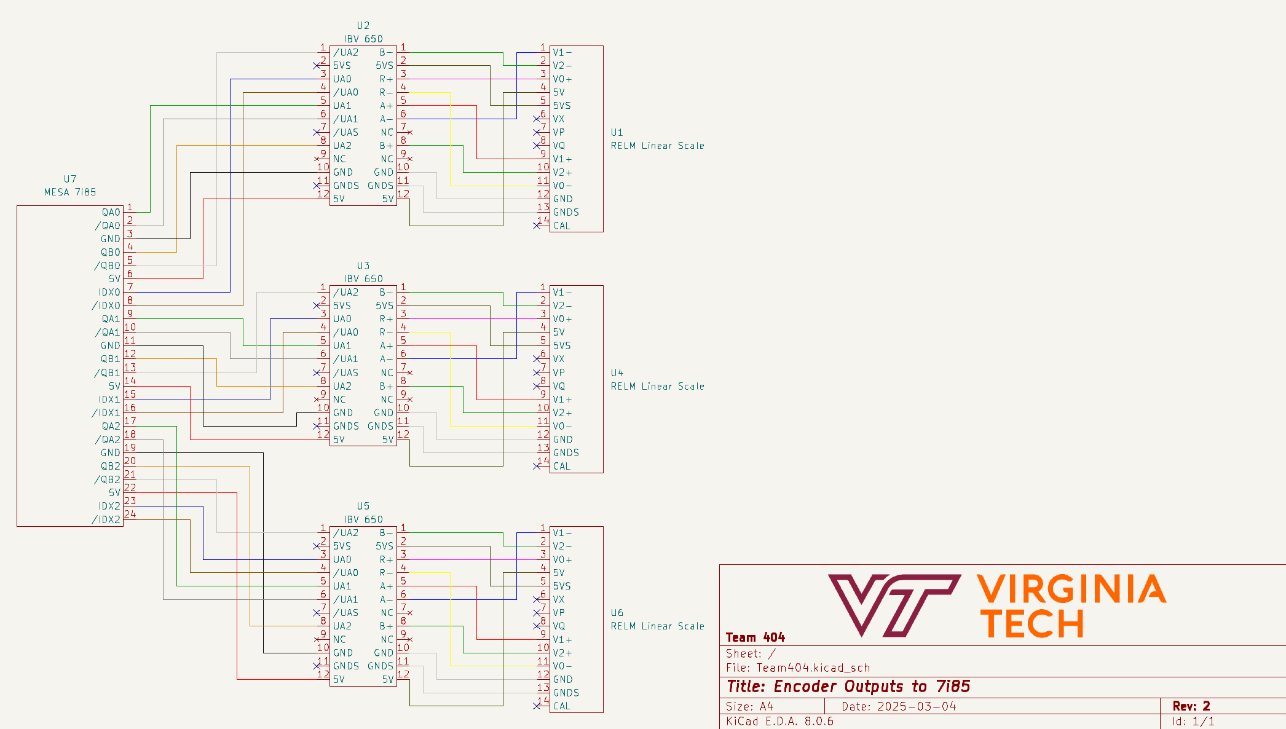
Drafted detailed schematics for the Mesa 7i96/7i85 stack, stepper drivers, scale inputs, and solenoid control. Added ferrite beads and star‑ground layout to tame electrical noise—critical when you’re chasing micron‑level repeatability.
Technologies Used
- LinuxCNC on PREEMPT‑RT kernel
- Mesa 7i96 motion controller + 7i85 encoder board
- C5 ground ball screws & zero‑backlash nuts
- Heidenhain 1 µm linear scales
- DM556T stepper drivers @128× micro‑step
- Pneumatic extrusion of conductive polymer
Results
By project close‑out I could generate working LinuxCNC configs from scratch, draft clean schematics, and produce wiring diagrams that others could follow. Test moves confirmed ±1 µm repeatability over 100 mm travel and the printer successfully deposited conductive traces, proving the motion system and extrusion timing.